






")
")
")
")




آیا تا به حال به این فکر کرده اید که چگونه یک وسیله نقلیه رباتیک (که معمولاً در کاربردهای نظامی استفاده میشود) برای خنثی کردن بمب کنترل می شود یا اینکه دستگاه های برش و شکل دهی فلز حرکت دقیق تراش و خمش برای ساخت فلز را فراهم می کنند؟ سروو موتور چیست؟ (Servo Motor) معمولاً در سیستمهای حلقه بسته که کنترل موقعیت دقیق معمولاً در کاربردهای صنعتی و تجاری وجود دارد استفاده می شوند. بنابراین تصمیم در انتخاب خرید سروو موتور مناسب و آگاهی درست از قیمت سروو موتور بسیار حائز اهمیت میشود.
سروو موتور چیست؟
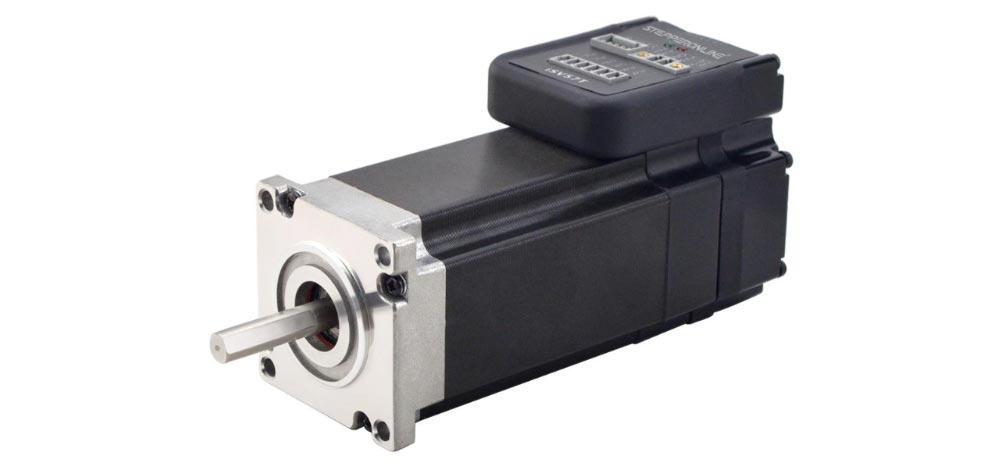
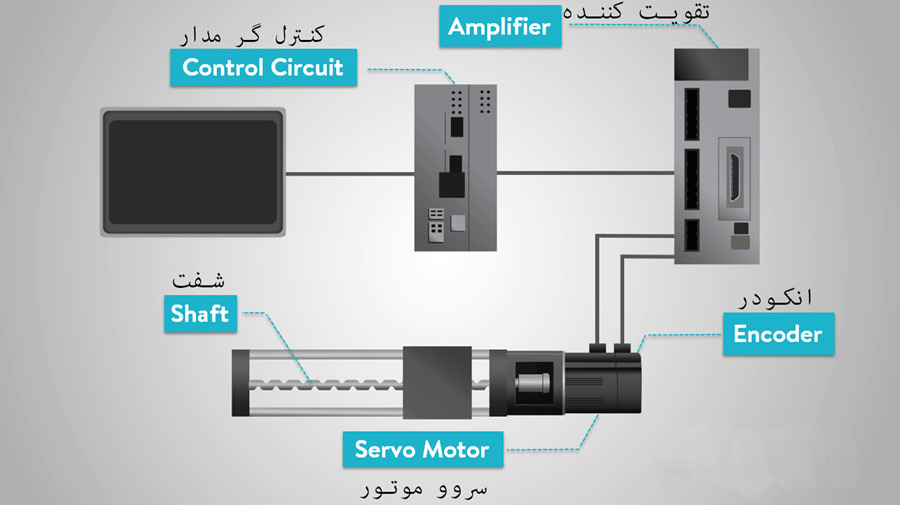
بیایید با اساس کاری سروو موتورها شروع کنیم. سروو موتورها بخشی از یک سیستم حلقه بسته هستند و از چندین قسمت شامل مدار کنترل، سروو موتور، شفت، پتانسیومتر، چرخ دنده های محرک، تقویت کننده و یا انکودر تشکیل شده اند. سروو موتور یک وسیله الکتریکی مستقل است که با راندمان بالا و با دقت بسیار زیاد قطعات ماشین را می چرخاند. شفت خروجی این موتور را می توان به یک زاویه، موقعیت و سرعت خاصی که یک الکتروموتور معمولی ندارد منتقل کرد.
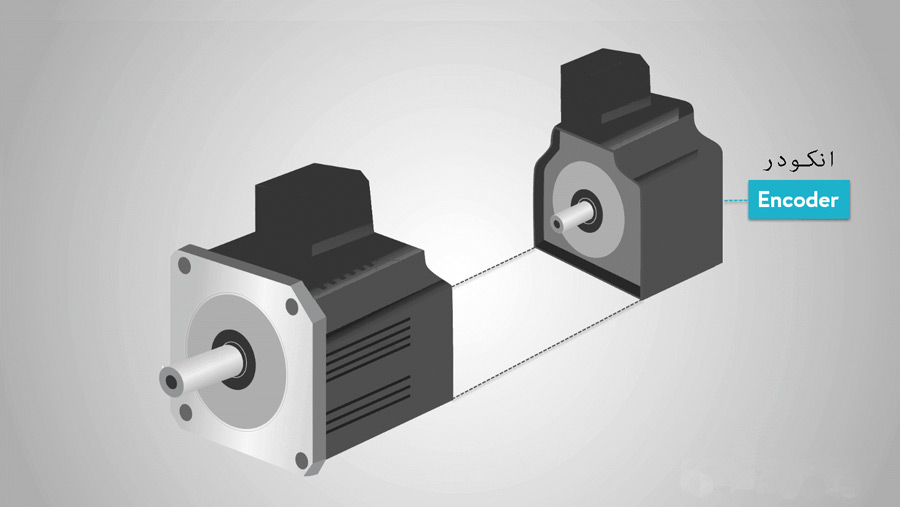
سروو موتور از یک موتور معمولی بهره می برد و آن را با یک سنسور برای بازخورد موقعیتی جفت می کند. کنترل کننده مهمترین قسمت سرو موتور است که به طور خاص برای این تجهیز طراحی و استفاده شده است.
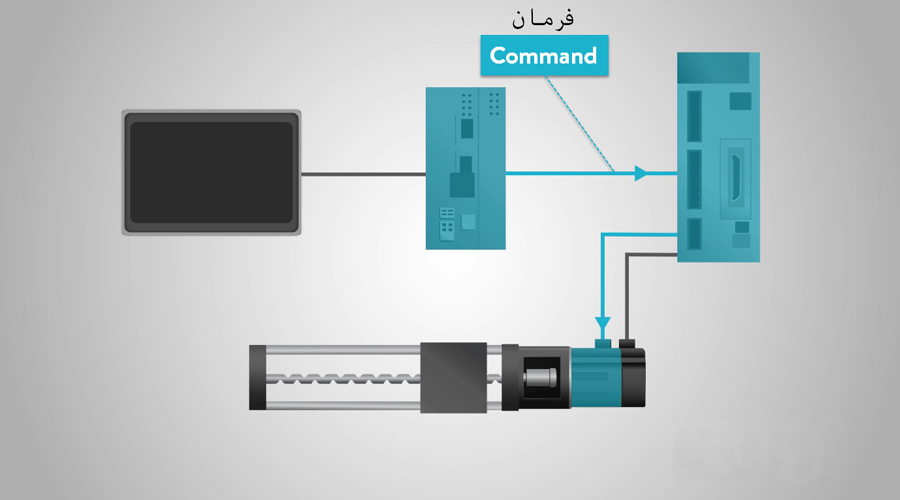
سرو موتور یک مکانیسم حلقه بسته است که برای کنترل سرعت و موقعیت چرخشی یا خطی، از بازخورد موقعیتی (فیدبک) استفاده می کند.
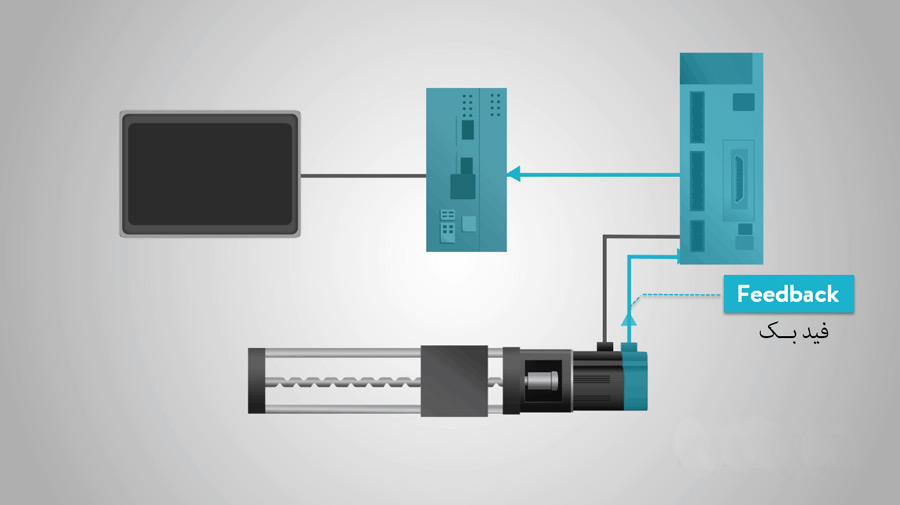
نشان دهنده موقعیت فرمان موتور با یک سیگنال الکتریکی، آنالوگ یا دیجیتال کنترل شده که میزان حرکتی را تعیین می کند که مقدار نهایی برای شفت میباشد.
مطلب تجهیزات اتوماسیون صنعتی را هم بخوانید
نشان دهنده موقعیت فرمان موتور با یک سیگنال الکتریکی، آنالوگ یا دیجیتال کنترل شده که میزان حرکتی را تعیین می کند که مقدار نهایی برای شفت میباشد.
برای خرید سروو موتور انواع آن رابشناسیم
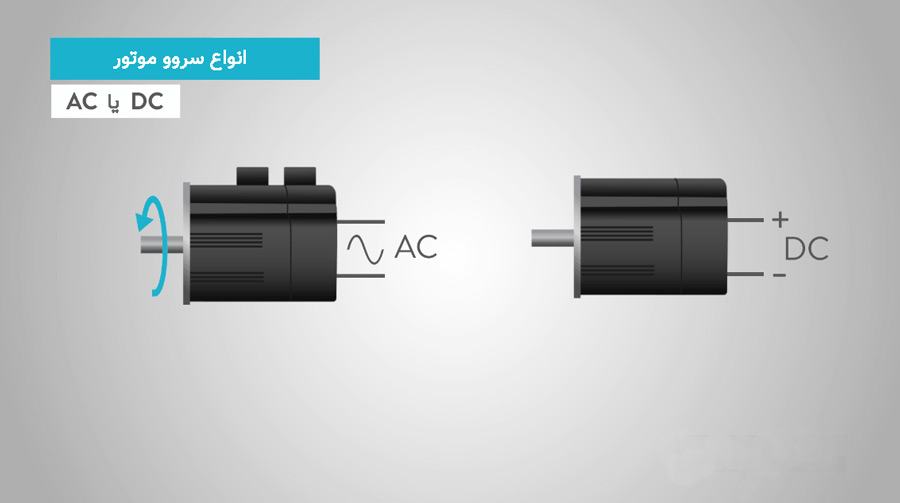
سروو موتورها بر اساس کاربرد در انواع مختلف طبقه بندی می شوند، مانند سروو موتور AC و DC. برای ارزیابی موتورهای سروو، سه ملاحظه اصلی وجود دارد. اولاً بر اساس نوع آنها که میتواند AC یا DC باشد، دوم بر اساس نوع کموتاسیون مورد استفاده (اینکه آیا موتور از جاروبک استفاده می کند یا خیر) و همچنین نوع سوم در نظر گرفتن میدان چرخش موتورها با پاسخ به این پرسش که نوع چرخش روتر سنکرون است یا آسنکرون.
ملاحظه AC یا DC بون این تجهیزات، اساسی ترین طبقه بندی موتور بر اساس نوع جریان مورد استفاده آن است. با نگاهی به نقطه نظر عملکرد ، تفاوت اصلی بین موتورهای AC و DC در توانایی مختلف هر کدام در کنترل سرعت میباشد.
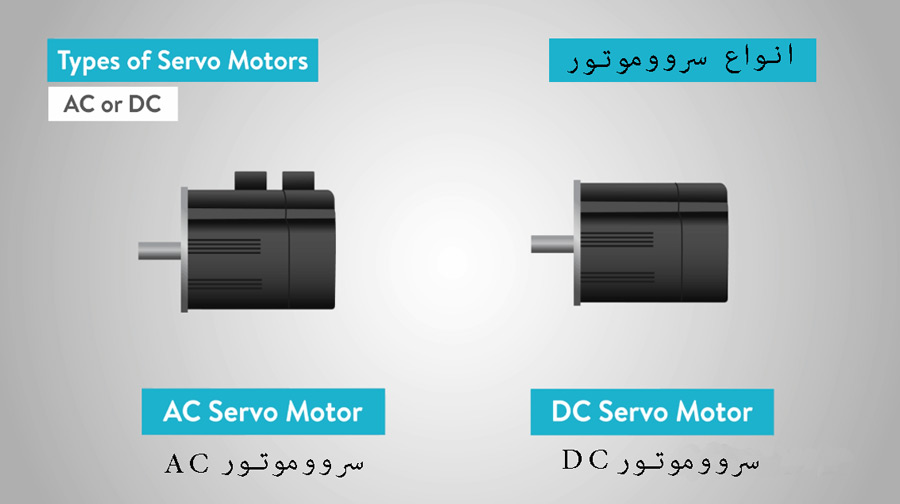
در یک موتور DC، سرعت مستقیماً با ولتاژ تغذیه با بار ثابت متناسب استو در یک موتور AC سرعت با فرکانس ولتاژ اعمال شده و تعداد قطب های مغناطیسی تعیین می شود.
سروو موتور چیست؟ – انواع و کاربرد:
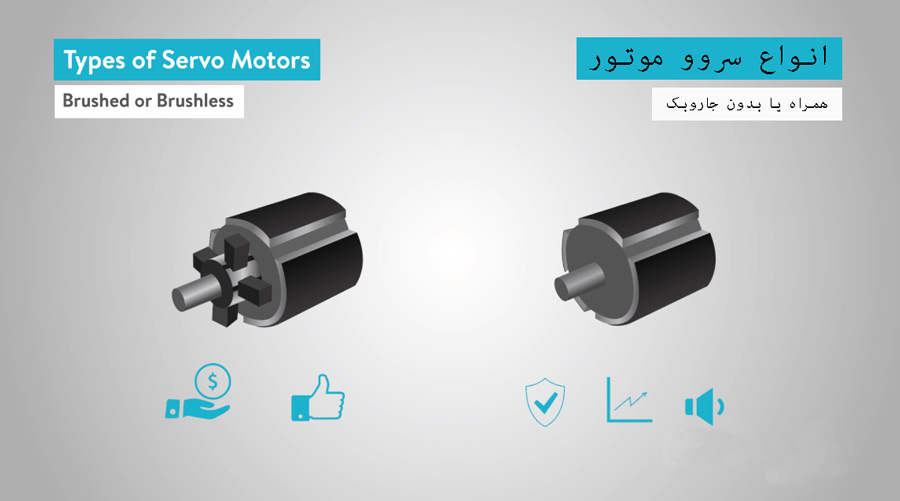
در حالی که از هر دو موتور AC و DC در سیستم های سروو استفاده می شود، موتورهای AC جریان بالاتری را تحمل می کنند و بیشتر در برنامه های سروو مانند ربات ها، قسمت ساخت داخل خط در کارخانجات و سایر کاربردهای صنعتی که به تکرارهای بالا و دقت بالا نیاز است، استفاده می شوند. داشتن و یا نداشتن جاروبک مرحله بعدی است که تمایز ایجاد میکند، سروو موتور DC به صورت مکانیکی و با جاروبک، با استفاده از کموتاتور یا به صورت الکترونیکی و بدون جاروبک جابجا می شود.
موتورهای همراه جابروبک معمولاً هزینه کمتری دارند و کار با آنها ساده تر است، در حالی که طراحی های بدون این قطعه از قابلیت اطمینان بیشتری برخوردار هستند، کارایی بالاتری دارند و سر و صدای کمتری نیز ایجاد میکنند.
کموتاتور یک سوئیچ الکتریکی دوار است که به صورت دوره ای جهت جریان بین روتور و مدار درایو را معکوس می کند. این قطعه شامل یک استوانه است که از چندین بخش تماس فلزی روی روتور تشکیل شده است. دو یا چند کنتاکت الکتریکی که «جاروبک» نام دارند، از یک ماده هادی مانند کربن ساخته شده و در مقابل کموتاتور تعبیه میشوند. هنگام چرخش روتور، جاروبکها با بخشهای رسانای کموتاتور تماس لغزشی خواهند داشت.
در حالی که اکثر موتورهای مورد استفاده در سیستم های سروو بدون جاروبک AC هستند، موتورهای مغناطیسی دائمی با جاروبک برای سادگی و هزینه کم بعضاً به عنوان موتورهای سرو استفاده می شوند. متداول ترین نوع موتور DC جاروبک دار که در کاربردهای سروو استفاده می شود، موتور DC مغناطیس دائم میباشد.
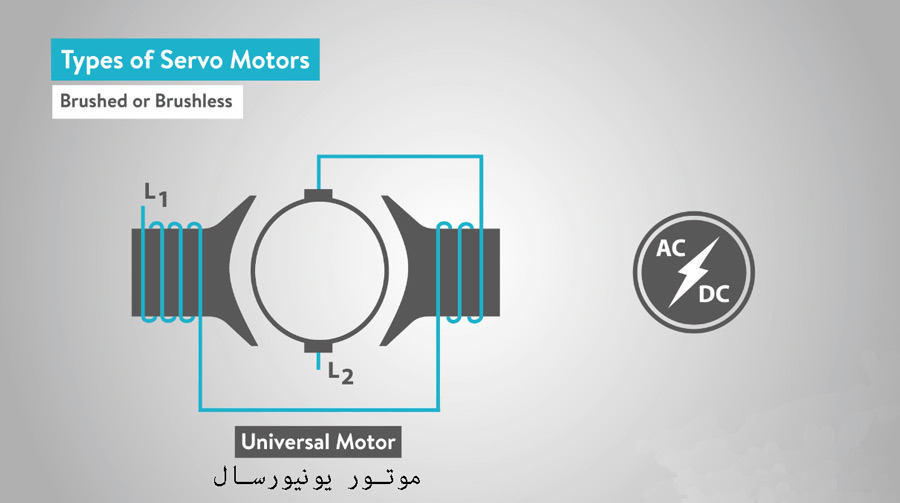
موتورهای AC به طور کلی بدون جاروبک هستند، اگرچه برخی از طراحی ها وجود دارد – مانند موتور یونیورسال، که دارای جاروبک بوده و به صورت مکانیکی فرآیند عملی کموتاور را به انجام میرساند.
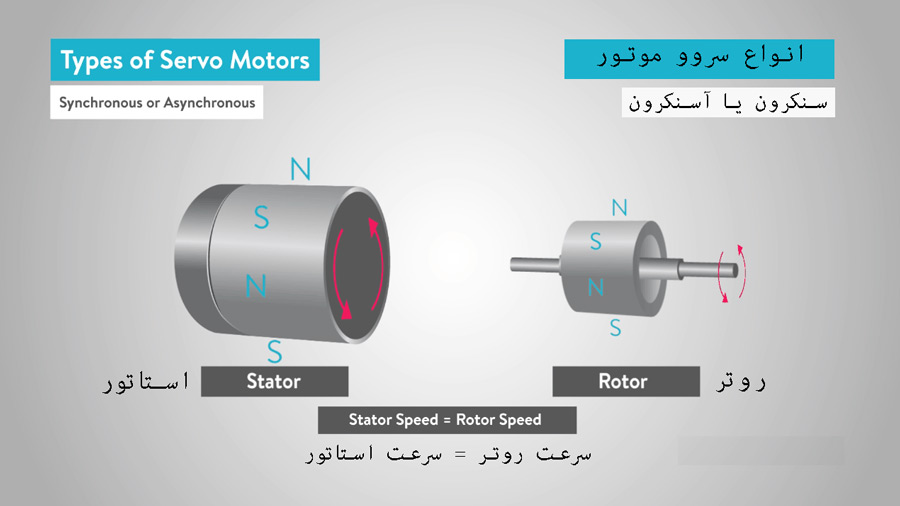
و طبقه بندی نهایی برای بررسی این است که آیا برنامه سروو از یک میدان چرخشی سنکرون یا آسنکرون استفاده می کند. در حالی که موتورهای DC به طور کلی در دسته های همراه یا بدون جاروبک قرار می گیرند، موتورهای AC اغلب با سرعت چرخش میدان سنکرون یا آسنکرون آن ها متفاوت می شوند.
اگر از ملاحظه انتخاب بر اساس AC-DC بودن سروو موتورها بخاطر بیاوریم در یک موتور AC، سرعت توسط فرکانس ولتاژ تغذیه و تعداد قطب های مغناطیسی تعیین می شود. از این سرعت به عنوان سرعت سنکرون یاد می شود. بنابراین، در موتور سنکرون، روتور با همان سرعت میدان مغناطیسی چرخان استاتور می چرخد.
سروو موتور چیست؟
با این حال، در یک موتور آسنکرون که معمولاً از آن به عنوان موتور القایی یاد می شود. روتور با سرعت کمتری از میدان مغناطیسی چرخشی استاتور می چرخد. همچنین سرعت یک موتور آسنکرون می تواند با استفاده از چندین روش کنترل مانند تغییر تعداد قطب ها و تغییر فرکانس منبع تغییر کند.
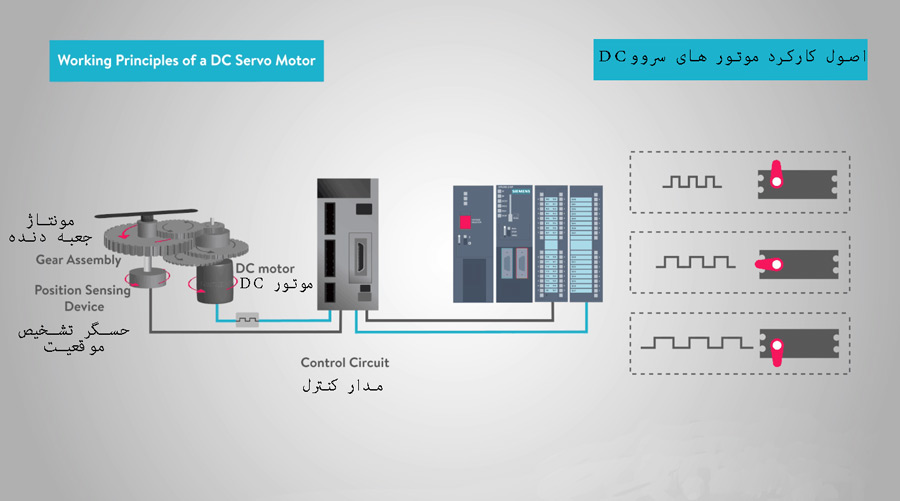
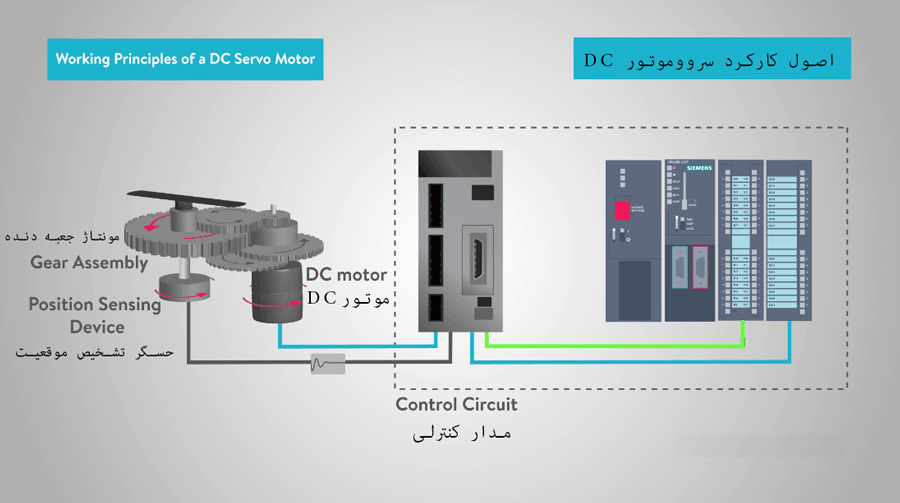
اصول کار موتور سروو DC میتوان در ساختار چهار جز اصلی از جمله، موتور DC، دستگاه سنجش موقعیت، مونتاژ جعبه دنده و مدار کنترل یافت. برای ایجاد سرعت مطلوبمان در موتورهای DC بایستی ولتاژ منطبق بر آن را اعمال کنیم. برای کنترل دور موتور، یک پتانسیومتر یک ولتاژ تولید می کند که به عنوان یکی از ورودی های تقویت کننده خطا اعمال می شود.
در بعضی از مدارها، از پالس کنترل برای تولید ولتاژ مرجع DC متناسب با موقعیت یا سرعت مطلوب موتور استفاده می شود و به مبدل ولتاژ عرض پالس اعمال می شود. طول موج پالس ایجاد شده، ولتاژ موجود در تقویت کننده خطا را به عنوان ولتاژ مطلوب تعیین کرده تا سرعت دلخواه تولید گردد. در بخش کنترل دیجیتال، از PLC یا کنترل کننده حرکت دیگر برای تولید پالس ها از نظر چرخه کار استفاده می شود تا کنترل دقیق تری ایجاد شود.
انواع سروو موتور
خرید سروو موتور – حسگر سیگنال فیدبک، اغلب یک پتانسیومتر است که ولتاژی را متناسب با زاویه مطلق شفت موتور در مکانیسم چرخدنده تولید میکند. بنابراین، مقدار ولتاژ فیدبک به ورودی تقویتکننده مقایسهکننده خطا وارد میشود. تقویتکننده ولتاژ تولیدی موقعیت فعلی موتور، یعنی فیدبک پتانسیومتر و موقعیت مطلوب موتور را مقایسه کرده و یک ولتاژ خطای مثبت یا منفی ایجاد میکند. این ولتاژ خطا به آرمیچر موتور وارد شده. زمانی که مقدار خطا زیاد میشود، ولتاژ خروجی به آرمیچر موتور اعمال میگردد.
موتور تا زمانی که خطا به سمت صفر میل کند به چرخش خود ادامه میدهد. اگر خطا منفی باشد، ولتاژ آرمیچر معکوس شده و در نتیجه آرمیچر در جهت عکس چرخش میکند.
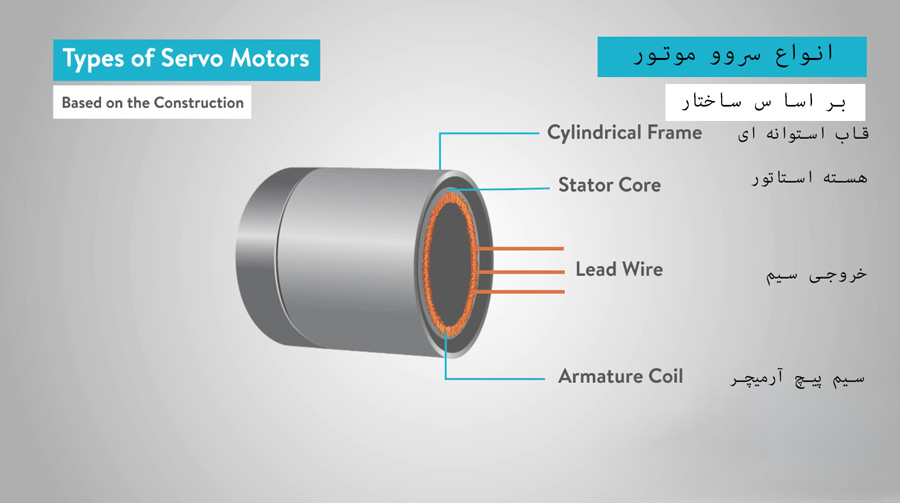
اساس عملکرد سروو موتورهای AC بر پایه ساختار دو نوع سروو موتور آسنکرون و سنکرون میباشد. سروو موتور AC سنکرون از استاتور و روتور تشکیل گردیده و استاتور متشکل از یک قاب و بدنه استوانهای و هسته استاتور میباشد. سیمپیچی آرمیچر به دور هسته استاتور کشیده شده و به یک سیم متصل گردیده تا بتواند جریان الکتروموتور را به خوبی تامین کند.
کاربردهای سروو موتور – خرید سروو موتور
سروو موتورها در سیستمهای صنعتی و تجاری کاربردهای فراوانی دارند. برای مثال، در مفاصل رباتهای صنعتی به کار میروند و زاویه حرکت دقیق را مهیا میکنند. برای فوکوس خودکار دوربینها، یک سروو درون دوربین تعبیه شده و موقعیت لنز را برای واضح کردن تصاویر به صورت دقیق تصحیح میکند. در سیستمهای مکانیابی، از سروو موتورها برای موقعیتیابی محور سمت و بلندی آنتنها و تلسکوپها استفاده میشود.